わが国では近年、BSE(牛海綿状脳症)や高病原性鳥インフルエンザなど人畜共通の伝染性疾病が発生しているが、これらは食に対する消費者の信頼感に影響を与えている。畜産物への信頼・安心を確保するためには、常日ごろから消費者に正確でわかりやすい情報を多様な媒体を通じて迅速に提供することが大切であるが、畜産物の生産・加工・流通の各段階における衛生・品質管理対策を通じて、安全・安心な畜産物の生産・供給を確保することが極めて重要である。
このため、当機構は、畜産業振興事業の一つとして「食肉処理効率化技術開発事業」を実施し、と畜場や食肉加工場における効率的・衛生的な食肉処理技術の開発などに対し補助を行っている。以下に、この事業の具体的な開発事例について紹介する。
より安心・安全な食肉処理へ
−牛用殴打式スタニングシステム−
1 開発の背景
牛をと畜する際のピッシング(と畜の際、牛を不動体化するための神経破壊措置。詳しくは、本誌11月号「専門調査レポート:牛肉の流通過程におけるピッシング廃止と安全性の確保」を参照)については、厚生労働省においても、その中止に向けての指導がなされている。しかし、わが国では、作業上の安全面などから、まだ多くのと畜場でピッシングが行われているため、その中止は食肉業界の課題の一つとなっており、ピッシングを中止した場合でも、安全で作業性の良いと畜システムの開発が必要となっている。
2 開発の状況
スタニング(と畜する際にスタンガンなどで失神させること)の効果を確実なものとするため、生体の固定装置を改良し、打撃ポイントを確実に殴打できるようスタニングボックスを改良した。
また、と体搬出時に一定の横臥位が得られるよう、と体受台も新たに製作された。
 新スタニングボックスの内部 |
 新たに製作されたと体受台 |
さらに、現行の殴打式エアガンでは、骨の硬化した乳廃牛などで衝撃力不足がみられることから、エアの圧力やぺネトレーター(エアガンの殴打部)の大きさ・形状について見直した。現在、これらの機器を実際にと畜場に持ち込んでの試験が実施されている。
−パルス電流による不動体化装置−
1 開発の背景
前述したとおり、ピッシングの中止は、食肉業界の課題の一つとなっており、作業員の安全を確保するため、ピッシングに代わる新たな不動体化技術の開発が求められている。
2 開発の状況
ピッシングに代わる新たな不動体化技術として、スタニング、放血処理直後の牛にパルス通電による電気刺激を与える方法の開発が進められている。
パルス発生装置と電気刺激用電極からなる実証機を用いた約400頭の試験では、不動体化についてほぼ問題なく、肉質についても、現行(ピッシングを実施)と比較して、枝肉または部分肉の血班(スポット)発生率が下回るとの結果が得られている。
現在、処理工程の時間短縮を図るため、電気刺激の電圧やパルス周期の最適な組み合わせについての試験を実施するとともに、肉質への影響に対する調査が継続されている。また、前述した牛用殴打式スタニングシステムとの併用の効果についても調査が進められている。
 パルス発生装置の本体 |
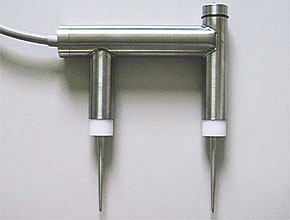 刺激用電極 |
省力化に向けたロボットの活用
−ロボットによる豚ロース・バラ脱骨装置−
1 開発の背景
豚の枝肉から部分肉への加工には、脱骨工程が欠かせないが、この作業は熟練を要する重労働であるばかりでなく、多数の人手が必要である。特に、ロース・バラ部位の脱骨は、複雑な形状の背骨があるため、とりわけ労働負荷が高く、作業員の経験と高い熟練度が求められる。
熟練作業者の高齢化が進む中で、熟練作業者の養成には多大な時間とコストが必要であることから、この工程にロボットを導入し、省力化、効率化を実現できる機器の開発が必要となっている。
 |
この装置を使用した作業の流れ 従来の人手作業で、ろっ骨まで脱骨 ▼ 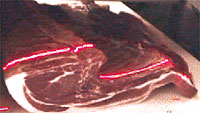 三次元計測 ▼  ロボットによる背骨のカット ▼  オリジナルハンドツールを使用し ボタン骨(乳頭突起)を除去 ▼  ナイフを使用し、棘突起および横突起を除去 ▼  脱骨作業終了 |
2 開発の状況
従来の人手作業とロボットによる作業を組み合わせて開発が進められた。作業の流れは、人手作業でロース・バラ部位のろっ骨を脱骨した上で、背骨の位置・形状を計測し、ロボットが背骨をカットした後、作業員が専用のハンドツールを用いてカット面の肉に埋まっている乳頭突起を除去、さらにナイフで棘突起、横突起を除去することになる。
開発に当たっては、個体により形状の異なる背骨を正確にカットするため、レーザーラインの下を一定の速度で肉を通過させ、この画像から断面の高さを算出する3次元計測が採用された。また、背骨のカットには、人手に近い動作が可能な6軸多関節ロボットが採用され、歩留まりを勘案し、背骨をV字(楔形)にカットすることとした。現在、実用機が開発され、食肉加工場においてテストが実施されている。
なお、この「ロボットによる豚ロース・バラ脱骨装置」は、社団法人畜産技術協会主催の第2回畜産技術研究開発奨励賞を受賞した。
より衛生的な内臓処理に向けて
−豚大腸のマル腸処理装置−
1 開発の背景
焼肉需要の増加に伴い、内臓などの畜産副生物の栄養的な価値や焼肉商材としての魅力が再評価されており、こうした中で、豚大腸のマル腸(腸を縦に切開せずに、表裏を反転させたもの)の商品化が増加している。より衛生的なマル腸の商品化を実現するとともに、処理作業の効率化を図るため、自動処理装置の開発が求められている。
2 開発の状況
開発の第一段階として、衛生処理の最大の課題である腸の内容物の分離処理について、腸の裏表を洗浄分離するため、大腸の構造上、形状の異なる部位4カ所を切断し、それを反転させてマル腸を製造する機器を製造した。
 マル腸処理機 写真右側のノズルから吸引された大腸は裏返しの状態でタンクに集められる。 |
その後、第二段階として、結合組織などにより団子状になっている大腸から腸の内容物を分離し、1本のひも状にする自動装置を開発し、マル腸処理装置として組み合わせることで、全自動化装置として開発するとの方向で技術開発が進められている。
第一段階の腸を反転吸引するマル腸処理装置については、既に商用機が完成し、食肉加工場において活用され始めている。
おわりに
と畜場や食肉加工場で使われる食肉処理の機械・設備は、用途や目的に応じて機能が細分化されるため、新技術を生かして開発された機械・設備であっても、その市場規模は決して大きくないのが現状である。このため、食肉処理技術の民間だけでの技術開発には、おのずと限界がある。
機構としては、この事業を通じて開発された技術が、と畜場や食肉加工場における衛生面での向上、作業負荷の軽減や省力化、食肉処理・加工コストの低減、消費者への安心・安全な食肉の提供に資することを期待している。
(参考)食肉処理効率化技術開発事業の仕組み
「食肉処理効率化技術開発事業」は、技術開発に関する基本構想などについての検討を行う「食肉処理施設技術総合改善推進事業(推進事業)」と実際に技術開発を行う「食肉処理施設総合改善効率化技術開発事業(開発事業)」の二つの事業から構成されている。
推進事業で設けられている技術開発推進委員会などで、より効率的・衛生的な食肉処理機械の開発および研究方法について検討を行い、開発事業ではその委員会と密接に連携を図りながら、食肉生産技術研究組合の組合員が分担して新たな食肉処理技術の開発を進めている。
この事業により開発された成果は、毎年、食肉産業展や開発成果発表会などで食肉関係者に紹介されるほか、財団法人日本食肉生産技術開発センターのホームページ(http://jamti.lin.go.jp)を通じてインターネットでも公開している。
なお、開発された技術を基に食肉処理に関する商用機が完成し、販売などで収益が上がった場合には、開発が終了した翌年度から5年間について、収益の一部を当機構に返還することとなっている。
平成17年度については、過年度から継続して開発を実施している10課題に加えて、今年度から新規に開発に取り組む7課題の計17課題の研究開発に対して補助している。