【要約】
新規に搾乳ロボットシステムを取り入れる放牧酪農経営における技術的課題を明確にすることを目的に、搾乳ロボットの利用状況、放牧地の状態の変化、牛群の滞在場所および牛群の食草行動を4月から10月まで調査した。その結果、搾乳ロボットを利用した放牧飼養では、舎飼い飼養とは大きく異なる牛群の移動が生じることから、個体当たりの搾乳ロボット侵入回数の減少や侵入間隔の延長が生じることが明らかとなった。放牧飼養において導入した搾乳ロボットの利用効率を高めるためには、放牧期および日内を通して牧草の量と質を高く維持し、放牧地と搾乳ロボットの移動の回数を増加させることが重要である。
1 はじめに |
短い草丈で高栄養価の草の乳牛への給与を、頻繁な転牧により可能とする集約放牧技術は、濃厚飼料の給与量を低減し自給飼料による乳生産を高める非常に優れたものである。国は飼料自給率の向上を今後の酪農近代化における重要な基本方針としており、この集約放牧を活用した酪農生産者の増加が必要とされている。
酪農生産が多い地域における雇用者人口の減少も深刻であり、多くの大規模酪農生産ではフリーストール・ミルキングパーラー方式を取り入れているが、そのための雇用労働者の確保が極めて困難な状況にある。このような中、さらなる労働者の減少に対応するため、最近では複数の搾乳ロボットを大規模フリーストール方式の中に取り入れる生産者も現れてきている。
現在の集約放牧を取り入れた中小規模酪農家では、搾乳作業を除けば、飼養給与作業など舎飼いに比べると労働時間は少なく労働生産性が高い。従って、集約放牧を行いつつ搾乳ロボットを取り入れることが可能となれば、さらなる労働時間の減少につながる。このような集約放牧・ロボット搾乳システムが地域に展開すれば、地域における労働者の減少に対応でき、放棄草地の再利用にもつながる可能性がある。さらに、大規模経営であっても集約放牧を取り入れた酪農形態も可能となるであろう。これらが実現すれば、集約放牧を取り入れる酪農生産者が増加することで、飼料自給率の向上に大きく貢献すると思われる。ひいては、魅力的な労働環境と景観を地域に提供することとなり、新規就農者を増加させ、また消費者が多く訪れることが期待され、それにより地域農業が活性化する可能性がある。
わが国は、温暖湿潤気候であるため放牧酪農先進諸国とは、牧草の生長様相が異なるためその技術も異なる。従って、わが国に独自の集約放牧・搾乳ロボットシステムにおける放牧管理技術を構築する必要がある。しかしながら、これまで導入例がなかったため、システムおける課題が明確でない。わが国おける集約放牧・搾乳ロボットシステムにおける牛群移動および牧区管理における課題を明確にし、それに対する対応策を検討することが必要不可である。
わが国における搾乳ロボット−集約放牧を普及するためには、実際の場面での技術的課題の情報収集が必要とされる。そこで、本調査では新規にこのシステムを取り入れる酪農家を調査し、技術的課題を明らかにする。
2 調査方法 |
(1)調査農家
本調査は、2017年4月から10月まで、北海道内の1件の酪農経営の牧場で実施した。この牧場は、離農した牧場を利用した経営であり、2016年から施設整備などの準備を始め、2017年1月より搾乳ロボットを用いた生乳生産を開始した。ほとんどの施設は、前牧場のものを利用しており、新規に付設した施設は主として搾乳ロボット1台とそのための搾乳舎であった。
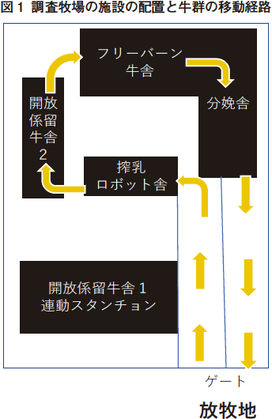
搾乳ロボット内では配合飼料が給与されるが、1回当たり最大給与量が割り当てられているため訪問回数が減少すると1回に給与される配合飼料の量は増加する。一方、1日当たりの搾乳回数の上限を上回って訪問したり、一度の搾乳時間の間隔未満で訪問した場合は、一日当たり最大給与量に達するまで搾乳が行われることなしに配合飼料が給与されることもある。図1に調査牧場の施設の配置と牛群の移動経路を示した。搾乳ロボット舎を中心に囲むように、開放係留牛舎2、フリーバーン牛舎および分娩舎が配置されていた。放牧地からゲートを通って帰ってきた牛は、連動スタンチョンに付設の開放係留牛舎1に入ることもできる。搾乳ロボットで搾乳された牛は、開放係留牛舎2、フリーバーン牛舎、分娩舎を通過して再び放牧地に戻ることができる。なお、放牧地に戻る経路では、開放係留牛舎1には直接には入ることができない通路となっていた。また、これらのそれぞれの牛舎において常時休息できるようになっていた。水場は牛舎施設へのゲート付近に設置されていた。
(2)飼養牛群
調査農家で飼養されていた牛群は全て初産次のホルスタイン種であった。調査時期における飼養頭数は、27〜33頭であり、ほとんどは2016年5月から12月の間に分娩した牛であった。調査期間中の牛群の搾乳牛頭数は27~33頭であった。
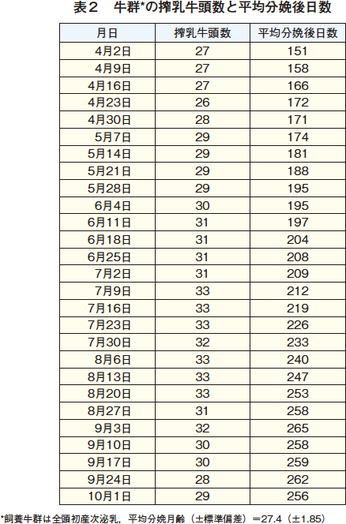
2017年4月2日時点で、平均分娩後日数は151日であり、調査期間中の搾乳牛群の構成は、数頭の牛が乾乳により外される、あるいは新たな分娩牛が入ることにより多少の変動はあったが、全体として分娩後日数は調査期間中の日数経過により延長し、10月1日時点での平均分娩後日数は256日であった。
(3)放牧地と飼養管理
調査牧場の放牧地の配置を図2に示した。全体の放牧地面積は約9ヘクタールであり、1〜5の牧区に分けられていた。4と3については、細分された牧区が設置されていた。1、2、3a、3b、4a区は平坦な放牧地であったが、3c、4b、5区は傾斜地であった。牛舎周辺の海抜は5mであるが、4b区と5区の境界付近が最も海抜が高く30メートル程度であった。電気牧柵で牧区間は区切られていた。

放牧の開始日は2017年6月4日であった。それまでの期間は、係留牛舎やフリーバーンで飼養されていた。調査終了時(10月11日)までは、これらの放牧地で1日〜数日単位の輪換方式で放牧されていた。さらに、昼間と夜間でも牧区を切り替える場合もあり、傾斜放牧地の利用は昼間のみとし、夜間には放牧していなかった。
4aと4b区を除く牧区は、月に10〜30回程度で利用されていた。しかし、4a区と4b区はそれらに比べると利用日数が少なかった。4a区は、排水が悪い土地で牛が侵入するとぬかるむこと、4b区は傾斜が非常にきついため管理者が利用を避けたことが原因と思われる。なお、9月以降では4b区は4〜5頭の乾乳牛用として利用されていた。
毎日、補助飼料や繁殖管理などのため、全牛群は13時ごろに係留牛舎に集められ、連動スタンチョンに係留されていた。ここでは、補助飼料として、糖蜜、大豆粉、ふすまペレットが1頭当たり1キログラム程度給与されていた。摂取後、ロボットへの順応が不完全で搾乳間隔の長い牛を優先的に搾乳ロボットへ誘導し搾乳していた。これらの牛の搾乳が終了するまで、それ以外の牛群は放牧地に戻されゲートは閉鎖された。搾乳優先牛の搾乳後は、このゲートは解放され自由にロボットへの侵入が許可された。
8月以降では放牧地の草量が不足したため、係留牛舎2付近にイネ科牧草のラップサイレージを置き、ロボットからの退出後、牛群に自由に摂取させていた。
(4)搾乳ロボットの稼働状況
搾乳ロボットの稼働状況は随時自動的に記録されるため、本調査ではこれらの記録を用いた。稼動状況の内容のうち用いた記録は、牛の侵入時刻、動作(搾乳か配合飼料の給与のみか)、滞在時間、乳量、配合飼料摂取量である。乳成分については、5月から9月までに実施された乳牛群能力検定事業のデータを用いた。
(5)放牧地の草量と牧草成分
2017年8月15日、8月29日、9月12日、9月27日、10月10日に牧場を訪問し、全ての牧区の草地調査を行った。草量の測定にはライジングプレートメーターによる圧縮草高を用いた。それぞれの調査日において、圧縮草高と実草量の関係の検量線を各回において得るために、これらの草量調査と測定を第1牧区において数点実施した。ここで刈り取った牧草は、サンプルとして持ち帰り成分分析に供した。乾物、粗タンパク質、粗脂肪、中性デタージェント繊維、酸性デタージェント繊維およびリグニンなどを測定した。それぞれの牧区における圧縮草高を、面積に応じて100~300カ所測定し、草量を推定した。
(6)牛群の滞在位置と食草時間
全牛群から、搾乳の誘導を必要としない12頭の牛を選抜し、8月15日から10月10日まで、牛の首輪にGPSと活動量計を装着した。GPSは、牛が放牧地か牛舎周辺のいずれに滞在していたかを判別するために用いた。GPSの記録は5分おきとしデータロガーに緯度と経度を自動的に記録させた。GPSデータの解析には、フリーGISソフトであるQGISを用いた。活動量計は、首輪が放牧時の牧草摂取時に揺れ動くことを利用して食草時間を推定するために用いた。4秒おきに運動強度を記録させ、これから各時刻における食草時間を求めた。なお、バッテリーの持続時間の限度のため、GPSと活動量計は訪問時に別のものに交換した。
これらのデータから、それぞれの場所での滞在時間および放牧時食草時間を一日の分布を含めて解析し、調査時期の進行に伴う変化を解析した。また、搾乳ロボットへの侵入前後の滞在位置の変化についても解析した。
3 調査結果 |
(1)放牧地の変化
調査農家では放牧は6月4日に開始されたが、8月から調査を実施した。乾物草量の変化を図3に示す。4bを除いた牧区ではいずれも、8月から10月までの間に、草量は大きく減少した。平坦地牧区(1,2,3a、3b)の平均では、8月15日では1ヘクタール当たり5.2乾物トン(以下「tDM」という) であったが、10月10日では同3.5 tDMとなった。傾斜地の3c牧区は、草量が10月10日では同2.1 tDMであり、全牧区の中で最も草量の少ない牧区であった。また、傾斜地の5区についても10月10日時点の草量は同2.4 tDMであり、平坦地牧区よりも草量が少なかった。一方、4aと牧区では9月下旬以降顕著に減少していた。これは乾乳牛を連続放牧したためと思われる。4b牧区では期間中に草量はほとんど減少しておらず、これは利用日数が全期間で13日、8月以降で7日と非常に少なかった(表1)ことを反映していた。
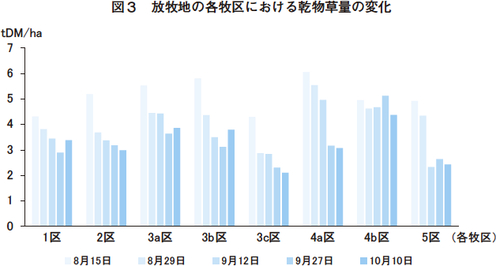

平坦地と同等の放牧利用日数である傾斜地の3cや5では、10月までの草量の低下が著しかった。これは、放牧牛が傾斜地の牧草を好んで採食したか、牧草の再生が悪かったかのいずれかによるものである。GPSの牛の移動データで概観した限り、牧区は均等に利用されており、特に傾斜地を好んでいたとは考えにくい。おそらくは、傾斜地であるためふん尿を含む肥培効果や土壌特性の差異により、牧草の生産が平坦地よりも劣ったためと考えられる。
放牧草の粗タンパク質(CP)含量は、20〜24%(乾物中)と高く推移した。CPを含め炭水化物や脂肪など主要な栄養素の含量には大きな変化はなかった。しかし、繊維消化性の指標となる酸性デタージェントリグニンは、時期の進行により3.7から6.3%(乾物中)に増加した。また、高消化性繊維の減少、低消化繊維の増加が認められ、放牧時期の進行に伴い繊維質の消化性が低下していたことは明確である。TDN(可消化養分総量)含量は時期の進行に伴い60から56%まで減少しており、これは繊維質の消化性の低下によるものと考えられる。
(2)乳量、乳成分および配合飼料の摂取量
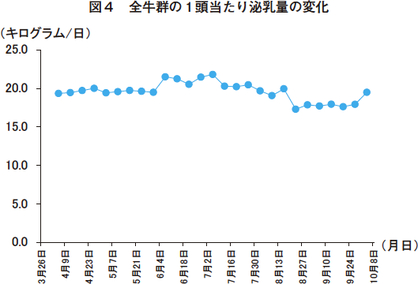
全牛群の個体平均泌乳量の変化を図4に示した。6月4日までの舎飼い期間中では、乳量は20 キログラム程度の一定値で推移した。放牧を開始した6月4日以降、乳量は2 キログラム程度増加し、その後7月上旬まで維持された。その後は、徐々に減少し8月下旬には18 キログラム程度までに減少した。放牧開始に伴う乳量の増加は、舎飼い中は粗飼料としてイネ科牧草のラップサイレージを給与されていたが、それよりも栄養価の高い牧草を自由摂取することができたためTDN摂取量が増加したためと考えられる。しかし、7〜10月では牧草の生長に伴う養分含量の低下と、放牧地の牧草量の低下により乳量は減少したものと思われる。しかし、平均分娩後日数も時期の進行とともに増加していたために(表2)、乳期の進行による減少の影響も含まれているであろう。10月初めの乳量の増加は、9月分娩牛が3頭牛群に加入したことによる影響である。
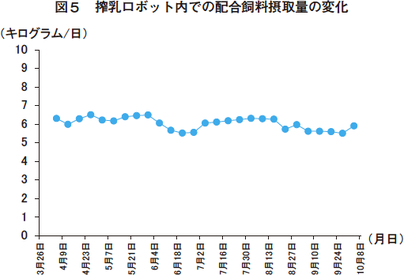
ロボット内での1日の配合飼料の最大給与量は管理者により乳期や乳牛の栄養状態などによって調節し設定できる。調査した時期の牛群は、平均分娩後日数は期間の進行に伴い配合飼料摂取量は増加したが、減少させることはなく、調査期間を通して5〜6キログラムで維持していた。しかし、6月4日の放牧開始からの1カ月間は、配合飼料摂取量は少ない傾向にあった(図5)。
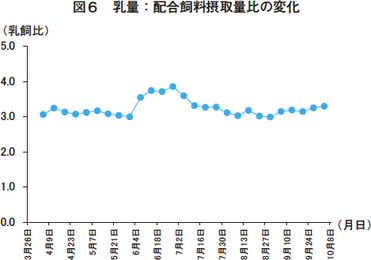
6月4日の放牧開始に伴い、乳飼比は明確に増加し、1カ月間は3.7〜3.9で維持された。その後は再び減少し、舎飼い時期と同様の3〜3.2程度の値となった(図6)。放牧開始後1カ月間の乳飼比の増加は、時期における乳量の増加と配合飼料の摂取量の減少によるものであるが、初期生長の栄養価の高い放牧草を摂取し、総TDN摂取量が増加した結果と思われる。
(3)搾乳ロボットの利用状況
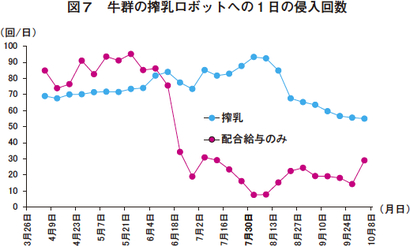
1日当たりの搾乳のための総回数は、舎飼い飼養時には70回程度で安定していたが、放牧開始と同時に時期の進行に伴う増減を示した。7月中旬以降では増加し、8月上旬では90回を超えたが、それ以降は大幅に減少し、10月上旬では60回程度となった。また、配合飼料給与のみの侵入回数は、舎飼い時には80回程度であったが、放牧開始と同時に10〜20回まで大きく減少した(図7)。
1日1頭当たりでみても、牛群全体の侵入回数と同様の変化を示した(図8)。これらの結果から、牛群が搾乳ロボット周辺で常に滞在する舎飼い飼養時には、配合飼料給与のためのロボット内への侵入が1日1頭当たり3回程度発生するが、放牧を行うことで遠方の放牧地から搾乳ロボットへ配合飼料給与のみのために帰還する回数が減少し、その回数は1日1回以下となることが明らかとなった。一方、搾乳回数については7月までは舎飼い時と同様の2.5回程度を維持したが、その後は減少し9月以降では2回を下回った。この減少は、放牧草の量と質の低下に伴う乳量の低下と関係しているであろう。
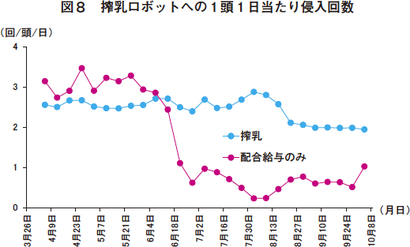
これらの結果から、本調査牧場における放牧方法と搾乳ロボットと通路の配置では、放牧草の量や質が低下する時期には、ロボットの利用回数が減少することが示唆された。
1日のうち搾乳ロボット内で牛が搾乳もしくは配合飼料給与の目的で滞在した延べ時間の調査期間中の推移を図9に示した。おおむね1日の牛群全体による利用回数と同様の変化を示した。搾乳と飼料給与の両者を合わせた総滞在時間は、放牧開始前は800〜900分で推移したが、6月4日の放牧開始とともに600分程度まで大きく減少した。8月中旬までは700分程度維持されたが、その後は徐々に減少した。総滞在時間の放牧開始に伴う減少は、飼料給与のための滞在時間が大幅に減少したためであった。飼料給与の滞在時間は、4月から放牧開始までの舎飼い時では300分程度であったが、放牧開始とともに減少し、放牧期間中を通して150分以下で推移した。一方、8月中旬以降の総滞在時間の減少は、搾乳の滞在時間の減少によるものであった。搾乳時間は、放牧開始とともに増加し、8月上旬では700分を超えたが、中旬以降は急減し500分以下となった。
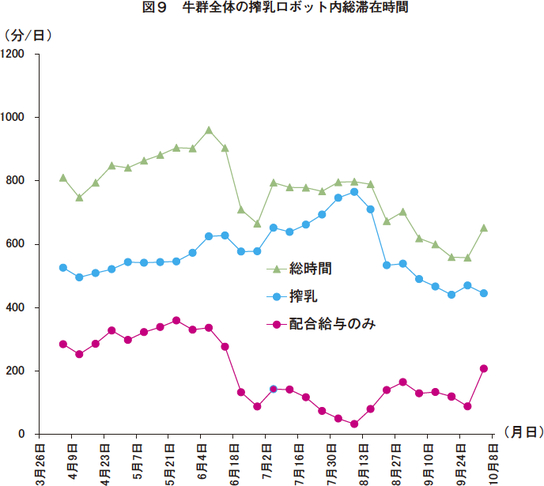
1日のうち午前10時から12時までの間は、バルククーラーや搾乳ラインの洗浄のためロボットへの牛の侵入を制限する時間があるものの、調査期間中のデータを見る限りさらに搾乳牛の頭数を増やしロボットの日内の稼働時間を増加させることは可能であることが示唆される。しかしながら、放牧地の面積は9ヘクタールであり、放牧強度は1ヘクタール当たり3頭と限界に近い値である。頭数を増やすためには、放牧地面積を増やすか、放牧頭数を制限するかのいずれかの選択を伴うであろう。
搾乳ロボットへの同個体が侵入する時間間隔の変化についても、他の利用状況と同様に、放牧開始に伴う大きな変動が確認された。舎飼い時では300分程度で安定していたが、6月4日の放牧開始以降、増加し9月以降では550分を超えた。これは、放牧開始に伴う搾乳回数と配送飼料給与回数の減少によるものであることは明確である。しかし、配合飼料給与のみの侵入回数が大幅に減少したことをより強く反映したものであろう。
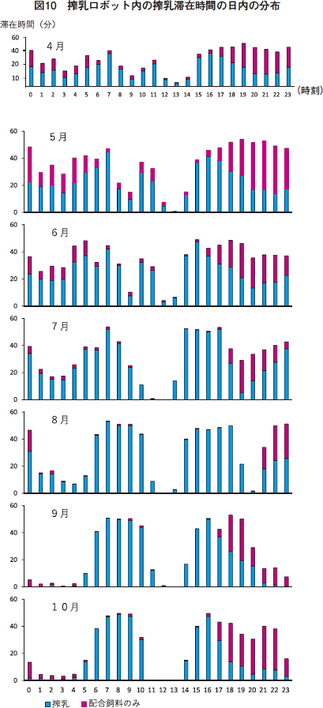
搾乳ロボットの滞在時間の日内分布を図10に示した。搾乳のための侵入は日内の日中に集中するものの、配合飼料のみ給与の侵入は夜間に集中することが明らかである。また、これらのパターンに舎飼い飼養と放牧飼養の差異はほとんどない。さらに、放牧期間中の配合飼料給与のみの侵入は17時から0時の間に集中していた。9~10月では0時から6時までの時間帯は搾乳にも、飼料給与にもほとんど利用されていなかった。
(4)放牧地滞在と食草時間
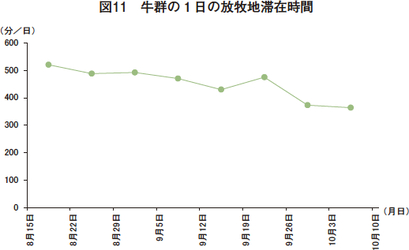
放牧地内の1日の滞在時間の8月中旬以降の変化を図11に示す。8月中旬では500分程度であったが、調査期間の進行に伴い漸減し10月では360分程度となった。
同期間中の食草時間の変化を図12に示した。食草時間は、8月中旬では300分であったが、9月以降大きく減少し、10月初旬では110分程度となった。これは、主として放牧草の現存量の減少や養分含量の低下による嗜好性の低下によるものと考えられる。また、8月以降から牛舎内で給与していたラップサイレージを摂取したことにより放牧草に対する食草意欲が低下したことも関係しているであろう。放牧地での滞在時間に占める食草時間の割合は、9月上旬までは60%程度であったが、それ以降は減少し10月初旬では30%程度となった。食草以外の時間は、牛は放牧地で休息していたと考えられるが、この割合が9月以降は増加したことがわかる。
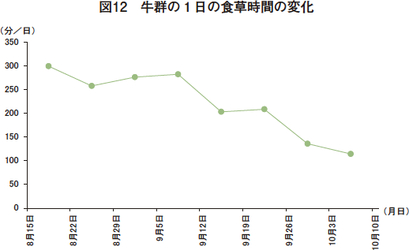
図13に放牧地の滞在時間と食草時間の日内分布を示した。いずれの時期においても夜明け以降の午前中、15時~16時以降に放牧地利用の大きな二つのピークが認められた。0時以降は、いずれの時期においてもほとんど放牧地に滞在していなかった。これらの結果から、牛群は夕方以降0時までの間に放牧地で食草あるいは休息しているが、徐々に搾乳ロボットを通って牛舎周辺で夜明け前まで休息するパターンが明らかである。ロボットの利用時間と合わせて考慮すると、この夜間前半の牛舎への帰還は搾乳ロボット通過時では設定の搾乳間隔に達しておらず飼料給与のみの侵入であったことがわかる。
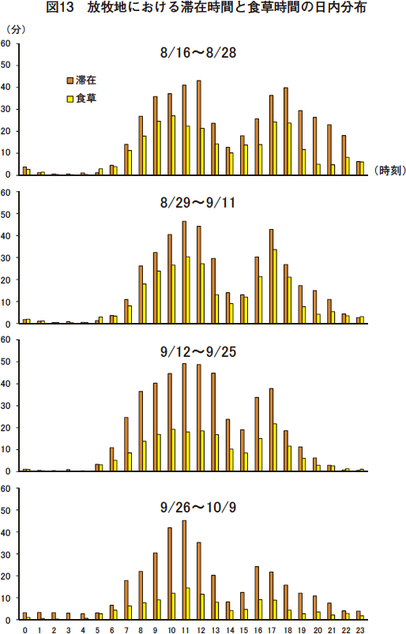
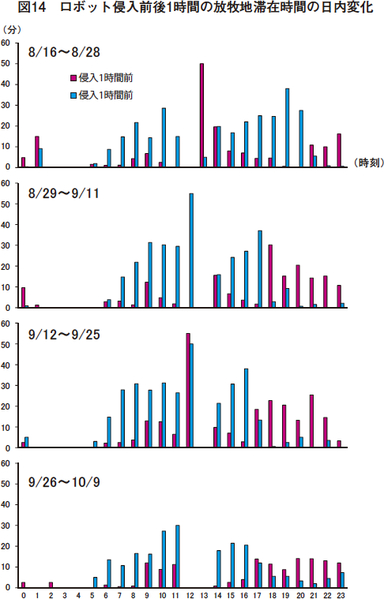
図14にはロボット侵入1時間前後の放牧地滞在時間の日内分布を示した。この結果から、日中では、侵入1時間後は侵入前よりも放牧地に滞在する時間が長くなることが明らかである。さらに、日没後から0時までの間は、侵入1時間前より1時間後では放牧地での滞在時間は短くなることが分かり、牛群が深夜から夜明けまでは牛舎周辺でとどまり、放牧地には移動しないことが明らかである。
4 まとめ |
以上の結果から、搾乳ロボットを利用した放牧飼養では、舎飼い飼養とは大きく異なる牛群の移動が生じることから、それに伴う個体当たりのロボット侵入回数の減少や侵入間隔の延長が生じることが明らかとなった。また、それらは、季節の進行に伴う放牧地の草量や栄養価の変化および日内の食草パターンによっても変動する可能性が示唆された。このような変動により搾乳ロボットの利用回数や時間からみた利用率が、低下する可能性がある。従って、放牧飼養において導入した搾乳ロボットの利用効率を高めるためには、放牧期を通して牧草の量と質を高く維持することが重要である。さらに、輪換放牧の方法においては、1日単位の牧区の切替ではなく、日内に数回の新しい草量と質の高い牧区への移動を可能な限り行い、この移動の間に搾乳ロボットを通し搾乳することが搾乳回数を高く維持し、搾乳ロボットの利用効率を低下させないことが重要な技術的課題と思われた。