【要約】
大規模飼養が進んできている養鶏現場では家畜飼養時の快適性に配慮し、安全で安心な食肉生産が求められている。本稿では飼育密度の違いによる鶏の行動解析、IoT技術を用いた鶏の個体管理手法、出荷後に用いる清掃ロボットを紹介する。RFID受信機を実装した体重計は計測器に長時間載った状態の個体で計測回数が多くなるなど、鶏の行動によって計測回数の傾向が変化した。飼育密度を変化させた鶏の行動解析では35日齢で立位休息、伏臥位休息、睡眠を合わせた休息行動で試験区間に有意差がなかった。65日齢では立位休息について試験区間に有意差が認められ、低密区で顕著であった。AIによる行動解析は3種類の行動に区分した画像データを基にした深層学習を行い、鶏行動の画像データの判定に利用できる可能性が示された。清掃ロボットは自走式四輪駆動車にフロントローダー(幅:0.9メートル)を取り付け、走行制御プログラムで自律走行しながら敷料(おがくず)を除去できた。
1 はじめに |
日本国内の鶏肉消費量は、平成27年が229万8000トン、28年が236万9000トンと前年比3.1%増となっている。同様に、国内生産量は平成27年度が151万7000トン、28年度が154万5000トンと消費量と連動して拡大している。国内の肉用若鶏(ブロイラー)飼養戸数は平成18年が2590戸、28年が2360戸と小規模飼養者層を中心に減少傾向にあるものの、出荷羽数は18年が1億368万7000羽、28年が1億3439万5000羽と増加しており、出荷羽数50万羽以上の大規模飼養者が全体の11.6%(28年)を占めるなど大規模化が進んでいる(29年農林水産省調べ)。
鶏の飼養は開放型、セミウインドレス型、ウインドレス型などの鶏舎を用いて一般的に平飼いで行われており、出荷後の清掃は乗用のホイールローダーなどによる敷料の除去と人手での消毒が行われている。平飼いは鶏の大規模飼養に際して個体管理が難しい状況にあり、農林水産省が目標とする育成率98%(32年度)の実現に対する障害の一つになっている。また、人手による清掃と消毒は家畜防疫の関係上好ましくないといえる。近年ではアニマルウェルフェア(Animal Welfare:動物の心理的幸福の追求、生活の質の向上)の観点から家畜飼養時の快適性についての配慮が疾病などの軽減につながることが指摘されており、飼養時での個体管理の重要性が増加している。飼養時の個体管理では飲水や飼料摂取、休息などの鶏の行動、摂取量、温度状況などの環境情報を総合的に解析して評価することが求められる。これらの情報はこれまで生産者による観察や個別でのデータ収集にとどまっていたが、近年のIoT(Internet of Things:各種センサーがインターネットにつながり、そこから多様な情報を得ること)技術の進展では、大容量の画像データと連動した各種センサーによる環境データをインターネット上のクラウドサーバーに収集し、それらをビッグデータとして高精度な画像処理装置(Graphics Processing Unit:大量の単純な計算に優れるシステムデバイス)による並列演算を用いた深層学習(Deep Learning)を利用した人工知能(Artificial Intelligence:以下「AI」という)による解析が可能になっている。AIの社会実装については自動走行などの工業面を中心に進んでいるが、農畜産業の現場ではまだ少ない現状にある。しかし、農畜産現場へのIoTやAI技術の活用は人の目でしか判別できなかった現象に対して各種センサーとコンピューターを目とした適切な判断が可能となり、農畜産物生産における有用な技術開発につながり、最適な生産システムの構築に有効である。
そこで、本稿では大規模飼養が進んできている養鶏での家畜飼養時の快適性に考慮し、安全で安心な食肉生産を実現することを目的に、飼育密度の違いによる鶏の行動解析、IoT技術を用いた鶏の個体管理手法、出荷後に用いる清掃ロボットについて紹介する。
2 実験方法 |
(1)鶏の個体管理手法
ア 実験場所:鶏の個体管理手法については2017年に山形大学農学部の家畜管理舎で実施した。
イ 実験手法
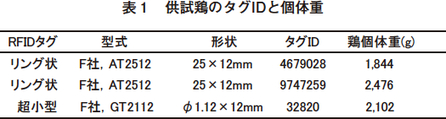
(ア)鶏の個別認識技術:試験個体は別実験で飼育中の採卵鶏3羽を用いた。供試した3羽の体重、取り付けたリング状と超小型の2種類のRFIDタグ(Radio Frequency Identifier:ID情報を埋め込んだタグから発生する電磁界や電波などを用いた近距離での無線通信で情報交換する機材)を図1、表1にそれぞれ示す。

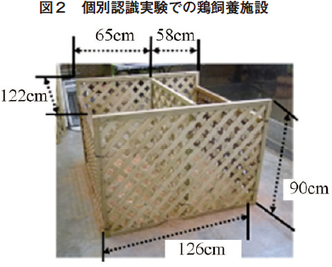
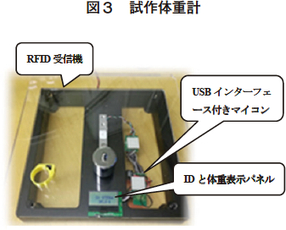
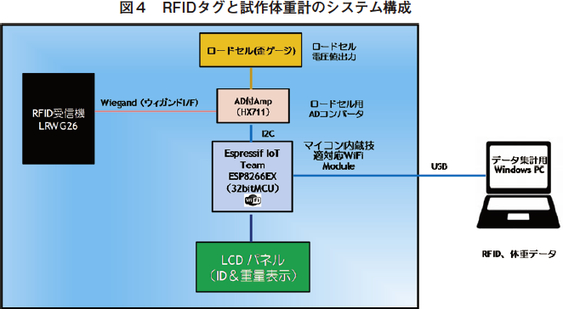
個別認識に関する実験では図2に示す通り、横122センチメートル、縦126センチメートル、高さ90センチメートルの囲いをした鶏飼養施設を管理舎内に設けた。鶏飼養施設は仕切り板(メッシュ型)で縦方向に2分割し、65センチメートル(餌箱配置)と58センチメートル(水飲み場配置)の区画を設けた。両エリア間には移動用の通路を1カ所設け、摂食と摂飲時に鶏が通路を通過するように設定し、通路内にRFIDタグの情報を受信する機材を内蔵した試作体重計(図3)を設置した。試作体重計に含まれるRFID受信機と体重測定用のデジタル荷重計(ロードセル:SC133)には、アナログ/デジタル変換入力とUSB 経由でRFIDのタグ情報とロードセルの値をパーソナルコンピューターに出力可能なマイコン基板が組み込まれている。試作体重計のシステム構成を図4に示す。
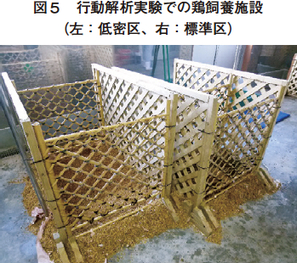
(イ)鶏の行動解析:供試動物はチャンキー種の肉用鶏20羽(雄)とした。飼育密度は坪当たり60羽(標準区)と20羽(低密区)の2水準とし、この飼育密度に合わせて各区に割り振った10羽分の必要な面積を設定し、図2と同様の材料を用いて鶏飼養施設を製作して飼育した(図5)。
肉用鶏は15日齢まで同一の飼養管理を行い、16日齢から各10羽を標準区と低密区に振り分けて飼育した。行動の調査はランダムに5羽を選んで個体識別し、35日齢と65日齢にビデオカメラ(P社、CSW-70HD)を設置して24時間連続で撮影し、1分おきに行動を記録した。なお、体重測定は毎週行い、飼料摂取量は毎日記録して週ごとにまとめた。
(ウ)AIによる行動解析:供試動物はチャンキー種の肉用鶏10羽(雄)で、図1と同形状で仕切り板がない飼養施設で65日齢まで飼養した。行動解析にはビデオカメラ(M社、M25)を3台配置して動画を撮影し、それをNAS(Network Attached Storage:B社、Terastation 5400DN)に飼養全期間の動画データを保存した。データは(2)の解析に従い、飼料摂取、飲水、その他の行動に1500枚ずつ区分し、それをワークステーション(D社、DK-1000)上のフレームワークChainerに読み込み500回(Epoch)の深層学習でAIによる行動分類を実施した。
(2)鶏舎清掃ロボットの開発
ア 実験場所:実験は2017年5月1日に福島県川内村にあるS社の実験鶏舎、8月14日と9月19日に山形大学農学部の家畜管理舎内でそれぞれ行った。
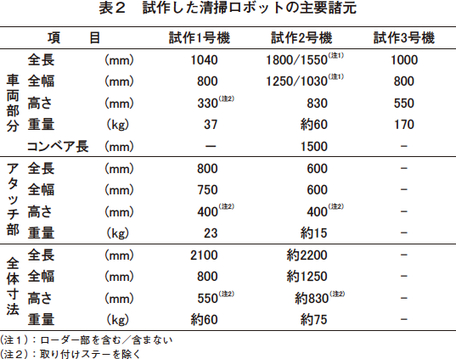
イ 供試機械:供試機械は試作した試作1号機(5月1日)と2号機(8月14日)、3号機(9月19日)を用いた。供試機械の主要諸元を表2に示す。
ウ 実験方法:実験鶏舎と家畜管理舎内には敷料としておがくずを一定量敷設し、そこで試作1〜3号機をそれぞれ走行させて作業性や走行性を調査した。
3 試験結果と考察 |
(1)鶏の個別認識技術
RFID受信機から鶏測定データを連続的に取得し、体重計からの出力を時間情報と同時にUSB経由で受信し、パーソナルコンピューター上にデータを2日間連続して記録した。計測中に鶏が体重計に載った時点での測定状況を表3に示す。
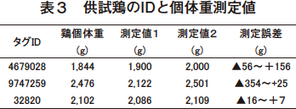
試作した計測器を用いた実験では体重計に長時間載った状態の個体で計測回数が多くなるなど、鶏の行動によって計測回数の傾向が変化した。タグID:9747259は誤差がマイナス354グラムと大きかった。これは体重計の近傍にいたタグID:32820の体重を誤読したものと考えられる。タグID:32820はタグの感度が低いため、タグ間の相互干渉が少なく、体重測定値の誤差が小さいことから実用性が高い。
RFIDによる鶏の個別認識は個体の動作と体重を追跡することに有効であるが、その取り付け方法について検討が必要である。また、RFIDの活用は体重計のデータと鶏の画像情報を連動して抽出することが可能となり、得られた体重と画像の各情報を区分してAIで学習をさせることで、肉用鶏の体重を映像から予測できると想定している。
(2)鶏の行動解析
35日齢では立位休息、伏臥位休息、睡眠を合わせた休息行動に関する試験区間に有意差がなく、各休息行動も試験区間に有意差がなかった。65日齢では、立位休息について試験区間に有意差が認められ、特に低密区で顕著であった。立位休息は動作の前後に現れることが多く、行動が活発であった低密区で多く現れたと考えられる。伏臥位休息と睡眠は試験区間に有意差がなかった。なお、睡眠は両日齢とも標準区と比較して低密区で多く確認できた。低密区の鶏は睡眠によって十分に体を休めることができたため、標準区の個体よりもリラックスした状態であった(表4)。体重の推移は各試験区間に差がなく、飼料要求率は低密区で高い傾向にあった。
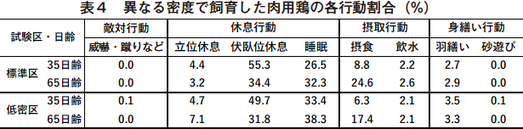
以上から、今回の実験で設定した飼育密度では肉用鶏の増体に与える影響が少ないが、低密度での飼育は肉用鶏をリラックスした状態にすることが確認できた。
(3)AIによる行動解析
AIによる行動解析の学習状況と結果の一例を図6にそれぞれ示す。
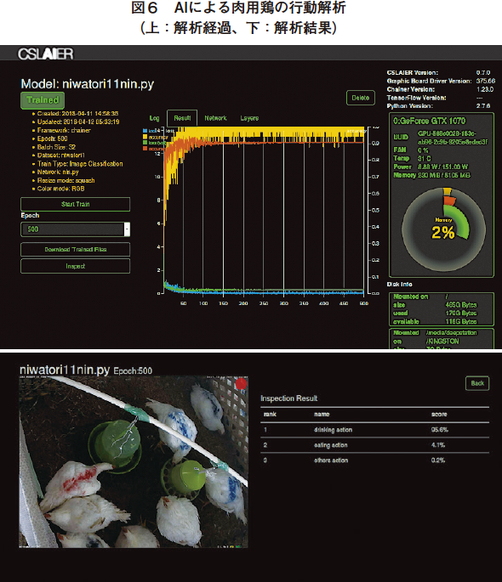
3種類の行動に区分した画像データを基にした深層学習では、学習回数100回まで判定精度が向上し、500回の学習で判定精度が飽和した。その結果を用いたAIは、別に用意した鶏行動の画像データの判定に利用できる可能性が示された。今後は学習用の画像データ数を増加し、AIによる判定精度改善につなげる予定である。
連続で撮影したビデオカメラ映像では、肉用鶏の飼養で一般的にみられる代謝障害(突然死症候)が2羽発症し、健康な鶏との動きの違いが確認できた。その特徴は、動きが鈍くなり、飼料摂取や飲水の行動が減退し、けいれんの動作が起こることであり、このような異常行動を区分して学習させることでAIを活用した兆候予測の可能性が示された。
(4)清掃ロボットの開発
開発した清掃ロボット1〜3号機を図7にそれぞれ示す。

試作1号機は前輪二輪駆動で車体フレームに敷料を除去・搬送するための清掃機とローダーを組み込み、操作はラジオコントロールで行う形式のものである。ローダーでの敷料の搬送・除去作業は、清掃機やローダー内におがくずが十分に堆積した場合に170〜200ニュートンの荷重が加わることになり、車輪に滑りが発生して走行性を維持できなくなった。
試作2号機は試作1号機でのローダー内の敷料堆積に対応するため、機体内に搬送用コンベアを設置してローダー内のおがくず堆積量を縮小して、走行性を確保する構造にした。しかし、実験では搬送用コンベアへのおがくず搬送量が不足し、ローダー内の堆積量が増加して走行性を維持できなかった。
試作3号機は試作1、2号機と別にベース機の自走式四輪駆動車にフロントローダー(幅:0.9メートル)を取り付けた。また、試作3号機は走行制御プログラムでおがくず内を自律走行する。開発機による敷料(おがくず:比重1立方センチメートル当たり1.39グラム、敷設容積:0.42立方メートル)の清掃実験では、組み込んだ自動走行プログラムで敷料を1秒当たり0.77キログラムで除去できた。
4 今後の取り組みと展望 |
本学では現在、飼育床面に設置した接触型センサーとRFIDタグを用いた個体認識情報、それと連動した電子式体重計で成育情報、個体認識で得られる画像データを統合し、鶏の増体と異常行動の発生要因についてAIでの解析を行っている。また、鶏舎内の清掃・消毒については清掃ロボットのほかにも消毒時のホースけん引作業に着目し、作業者に追従して移動するホースけん引ロボットの開発を行っている。ロボットはこれまでの自走式四輪駆動車の技術を基に、通信機能のあるモーターを搭載し、作業者に取り付けたマーカーに追従する機体となっている。
日本の農業、畜産、林業、水産業は高齢化による担い手不足から、1次産業へ関わる人材の不足が深刻な問題となっている。また、畜産では鳥インフルエンザなどの感染病対策として、感染要因を持ち込まないため人の出入りを制限できる遠隔監視での鶏の生育技術の確立が急務になっている。さらに、動物行動に対するAIの利用は、異常行動に対する予測に応用することが考えられ、生産性の改善に寄与できる。
現在、開発を進めている本技術はIoTを用いた高度な動物の行動監視技術であるため、牛、豚をはじめさまざまな動物の飼育について人手を介在した作業の軽減につながることが想定され、それによって畜産業全体での大きな経済効果が見込まれる。